Projects
In this section, I present some of my work related to machine learning, image and signal processing, scientific programming and computations.
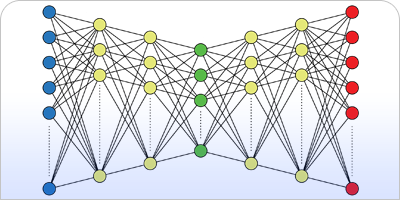
Gear fault detection by unsupervised deep learning of autoencoder
Python TensorFlow Scikit-learn NumPy Scipy PandasProposed method of failure detection in toothed gears is based on the reconstruction of gear case vibrational signal. Its effectiveness was tested in an experiment on a power circulation test stand. The method offers high efficiency (0.95 F1-measure) in gear state prediction (100% in failure detection, 89.8% in normal state prediction) and high sensitivity while it can detect even slight surface damage (initial pitting).
Read more → Jump to code →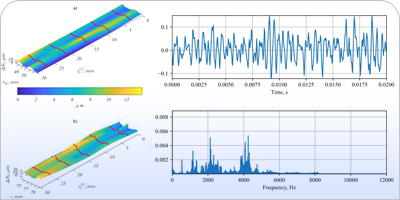
Vibration excitation in gearboxes due to surface deviations
Python NumPy Scipy Matlab Differential geometry Optimization ToolboxThis work is part of a larger international project related to the influence of gear accuracy on vibration and noise excitation. My job was to determine what is the influence of gear surface deviations on transmission error and the resulting vibration of the gearbox. For that purpose, I developed a mathematical model that enables to comparison transmission error spectrum with the spectrum of the actual gear case acceleration signal.
Read more → Jump to code →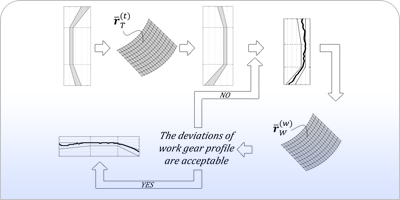
The method of prediction of tooth profile deviations in gear honing
Matlab Differential geometry Optimization ToolboxThis project comes with my cooperation with one of the world's leading manufacturers of aerospace gears. The goal was to develop a method for effective error-free design of honing tools for airspace gears. I came up with the mathematical model of the gear honing process based on which the method of prediction of profile errors was established and used within the design flow of honing tools.
Read more → Jump to code →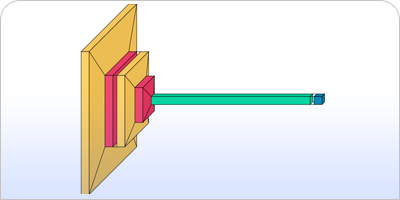
Vision based control of small educational double SCARA robot
Python OpenCV TensorFlow Scikit-learn NumPy Scipy C RaspberryPI MatlabThe aim of this project was to develop an easy-to-build and deploy educational robot, which may be used during classes to study machine vision-based control and classification. This was achieved by a double scara structure driven by two stepper motors controlled by RaspberryPI Zero. Exercises may include inverse kinematics, control and positioning, data collection, and image classification.
Read more → Jump to code →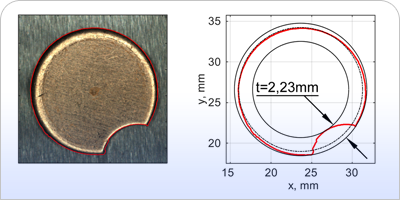
Image processing algorithm for evaluation of the roundness of small objects
Matlab Image Processing Toolbox Optimization ToolboxThis was the part of larger project in which team under my lead was responsible for the design of a system for automatic inspection of small objects – copper seals for fuel and gas installations. In the designed automatic control system machine vision was used among others to evaluate the roundness of manufactured sealings and their prefabricated material.
Read more → Jump to code →
What is the optimal shape of sofa?
Matlab Differential geometry Optimization ToolboxThis project results from my interest in math. What is the largest area of region that can be moved through a ninety-degree corner in a hallway of unit width? - this problem called "the moving sofa problem" was formulated for the first time by Moser and till now has not been solved fully. Here I present my implementation of the method for obtaining the shape and area of the sofa. The proposed approach is based on discrete solving the equations, which state the necessary conditions of envelope existence.
Read more → Jump to code →